Seeking Power is Often Robustly Instrumental in MDPs relates the structure of the agent's environment (the 'Markov decision process (MDP) model') to the tendencies of optimal policies for different reward functions in that environment ('instrumental convergence'). The results tell us what optimal decision-making 'tends to look like' in a given environment structure, formalizing reasoning that says e.g. that most agents stay alive because that helps them achieve their goals.
Several people have claimed to me that these results need subjective modelling decisions. For example, ofer wrote:
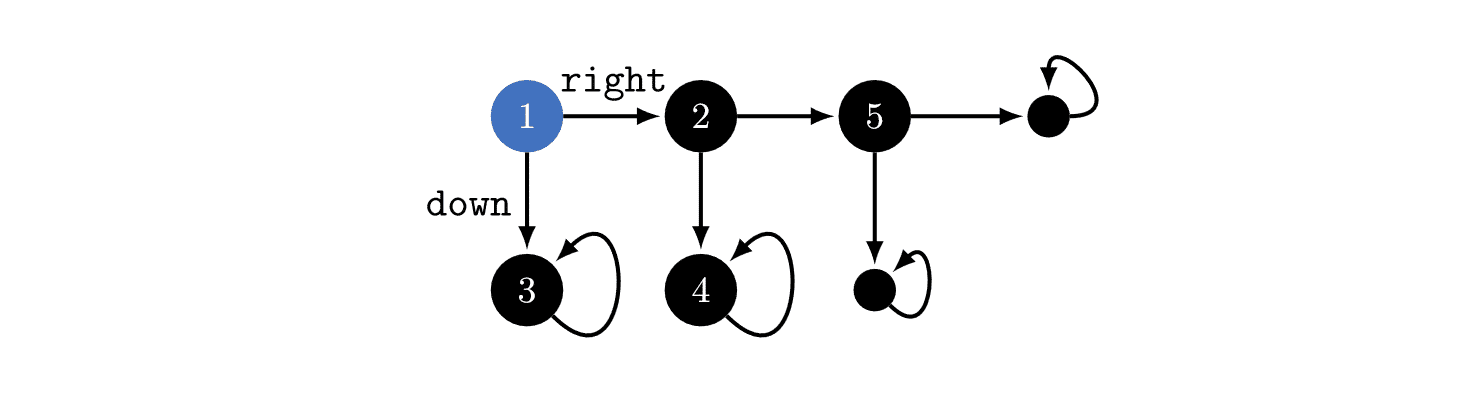
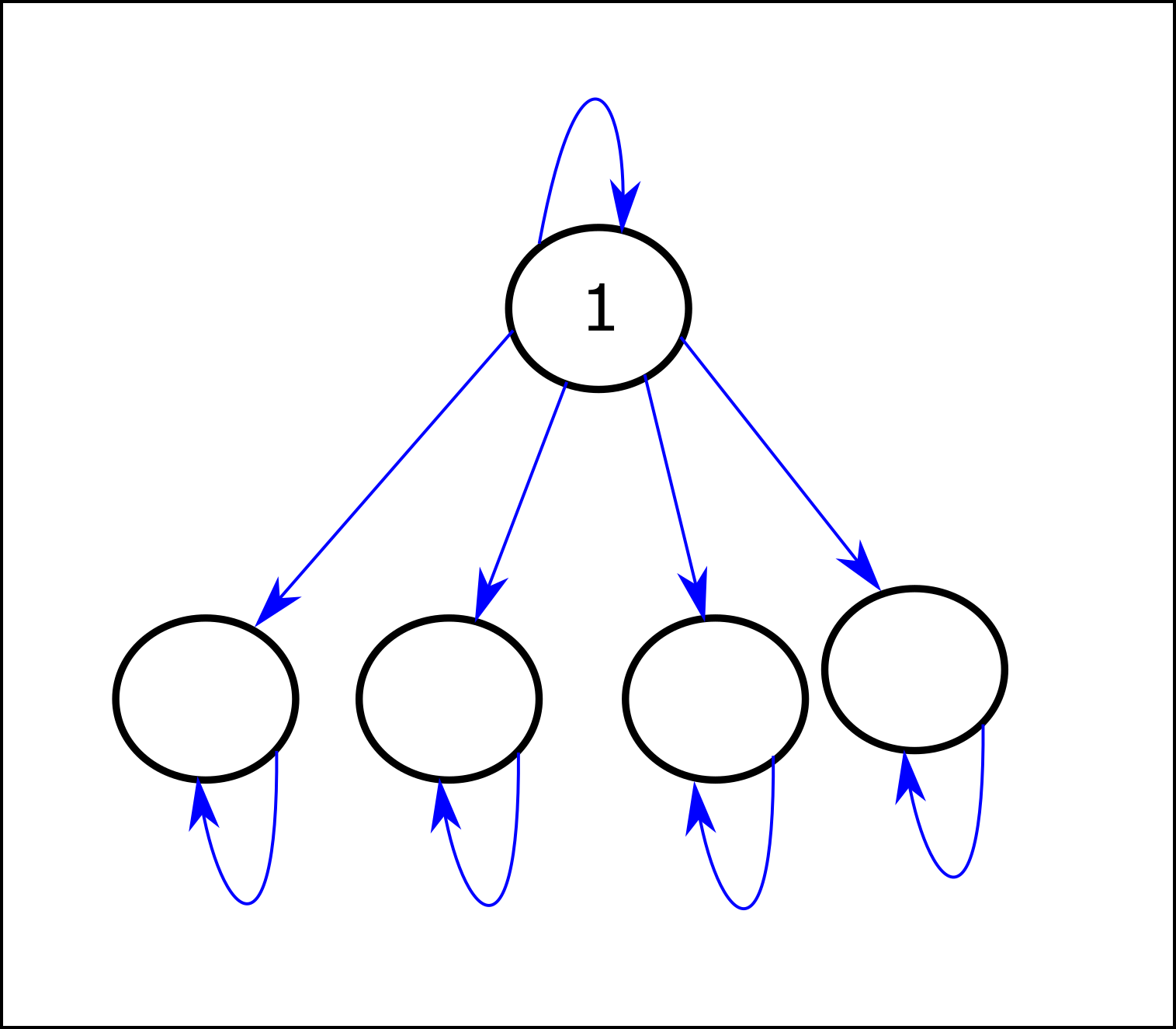
I think using a well-chosen reward distribution is necessary, otherwise POWER depends on arbitrary choices in the design of the MDP's state graph. E.g. suppose the student [in a different example] writes about every action they take in a blog that no one reads, and we choose to include the content of the blog as part of the MDP state. This arbitrary choice effectively unrolls the state graph into a tree with a constant branching factor (+ self-loops in the terminal states) and we get that the POWER of all the states is equal.
In the above example, you could think about the environment as in the above image, or you could imagine that state '3' is actually a million different states which just happen to seem similar to us! If that were true, then optimal policies would tend to go , since that would give the agent millions of choices about where it ends up. Therefore, the power-seeking theorems depend on subjective modelling assumptions.
I used to think this, but this is wrong. The MDP model is determined by the agent's implementation + the task's dynamics.
To make this point, let's back out to a more familiar MDP: Pac-Man.
When the discount rate is near 1, most reward functions avoid immediately dying to the ghost, because then they'd be stuck in a terminal state (the red-ghost-game-over state). But why can't the red ghost be equally well-modeled as secretly being 5 googolplex different terminal states?
An MDP model (technically, a rewardless MDP) is a tuple , where is the state space, is the action space, and is the (potentially stochastic) transition function which says what happens when the agent takes different actions at different states. has to be Markovian, depending only on the observed state and the current action, and not on prior history.
Whence cometh this MDP model? Thin air? Is it just a figment of our imagination, which we use to understand what the agent is doing as it learns a policy?
When we train a policy function in the real world, the function takes in an observation (the state) and outputs (a distribution over) actions. When we define state and action encodings, this implicitly defines an "interface" between the agent and the environment. The state encoding might look like "the set of camera observations" or "the set of Pac-Man game screens", and actions might be numbers 1-10 which are sent to actuators, or to the computer running the Pac-Man code, etc.
(In the real world, the computer simulating Pac-Man may suffer a hardware failure / be hit by a gamma ray / etc, but I don't currently think these are worth modelling over the timescales over which we train policies.)
Suppose that for every state-action history, what the agent sees next depends only on the currently observed state and the most recent action taken. Then the environment is Markovian (transition dynamics only depend on what you do right now, not what you did in the past) and fully observable (you can see the whole state all at once), and the agent encodings have defined the MDP model.
In Pac-Man, the MDP model is uniquely defined by how we encode states and actions, and the part of the real world which our agent interfaces with. If you say "maybe the red ghost is represented by 5 googolplex states", then that's a falsifiable claim about the kind of encoding we're using.
That's also a claim that we can, in theory, specify reward functions which distinguish between 5 googolplex variants of red-ghost-game-over. If that were true, then yes - optimal policies really would tend to "die" immediately, since they'd have so many choices.
The "5 googolplex" claim is both falsifiable and false. Given an agent architecture (specifically, the two encodings), optimal policy tendencies are not subjective. We may be uncertain about the agent's state- and action-encodings, but that doesn't mean we can imagine whatever we want.
(I think that the same point holds for other environment types, like POMDPs.)


(I continued this discussion with Adam in private - here are some thoughts for the public record)
I think I'm claiming first bullet. I am not claiming the second.
Yes, that.
It doesn't have to be unique. We're predicting "for the agents we build, will optimal policies in their MDP models seek power?", and once you account for the environment dynamics, our beliefs about the agent architecture, and then our beliefs on the reward functions conditional on each architecture, this prediction has no subjective degrees of freedom.
I'm not claiming that there's One Architecture To Rule Them All. I'm saying that if we want to predict what happens, we:
There's a further claim (which seems plausible, but which I'm not yet making) that (2) won't affect (4) very much in practice. The point of this post is that if you say "the MDP has a different model", you're either disagreeing with (1) the actual dynamics, or claiming that we will physically supply the agent with a different state/action encoding (2).
To falsify "5 googolplex", all you have to know is the dynamics + the agent's observation and action encodings. That determines the MDP structure. You don't have to run anything. (Although I suppose your proposed direction of inference is interesting: power-seeking tendencies + dynamics give you evidence about the encoding)
The encodings + environment dynamics tell you what model the agent is interfacing with, which allows you to apply my theorems as usual.